


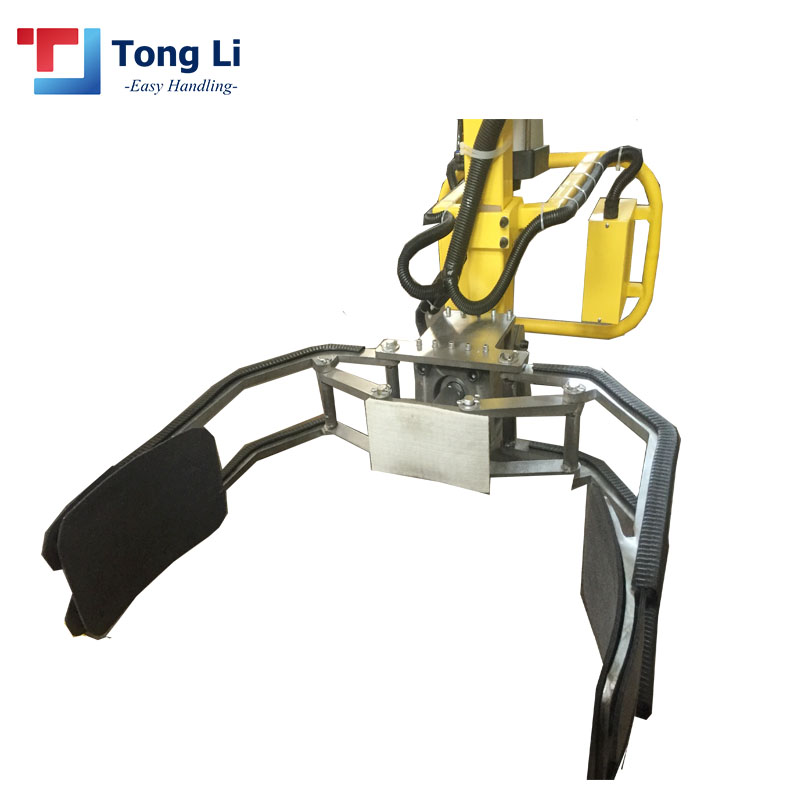


Manipulator mat Klemm
Aféierung
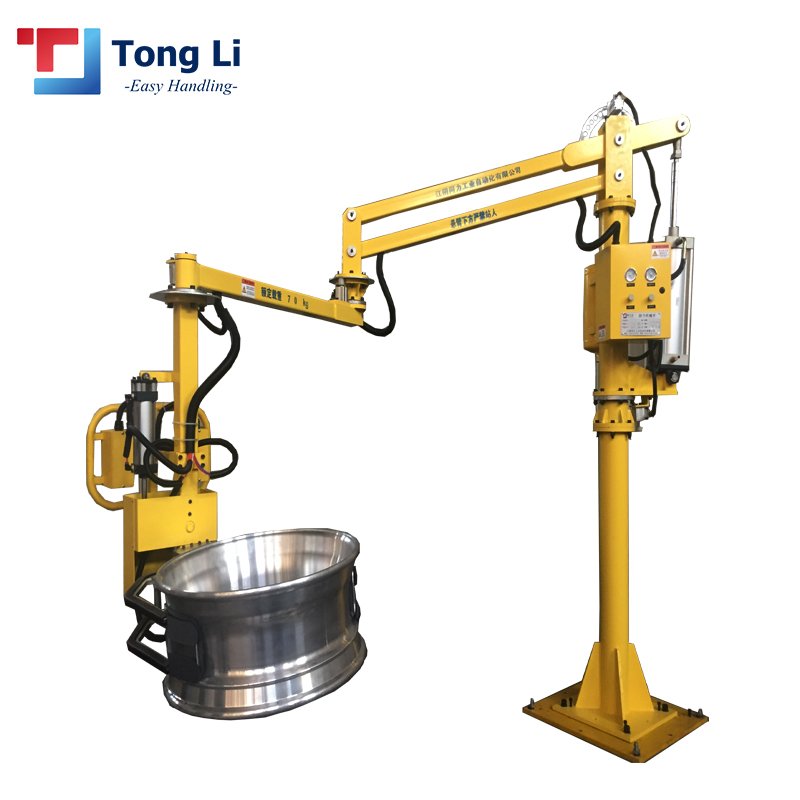
a) Dee selwechte Kraaft-Hard-Aarm-Assistenzmanipulator kann verschidde Gewiichter vun 2 bis 500 kg ausbalancéieren.
b) De kraftgestëtzte Manipulator besteet aus engem Gläichgewiichtshost, enger Gräifvorrichtung an enger Installatiounsstruktur.
c) De Manipulatorhost ass den Haaptapparat, deen den net-gravitativen Schweefzoustand vu Materialien (oder Werkstécker) an der Loft realiséiert.
d) De Manipulator ass den Apparat, deen d'Gräife vum Werkstéck realiséiert an déi entspriechend Ufuerderunge vum Benotzer wat d'Handhabung an d'Montage ugeet, erfëllt.
e) D'Installatiounsstruktur ass e Mechanismus, deen de ganze Set vun Ausrüstung jee no dem Serviceberäich vum Benotzer an de Konditioune vum Site ënnerstëtzt.

| Ausrüstungsmodell | TLJXS-YB-50 | TLJXS-YB-100 | TLJXS-YB-200 | TLJXS-YB-300 |
| Kapazitéit | 50 kg | 100 kg | 200 kg | 300 kg |
| Aarbechtsradius | 2500mm | 2500mm | 2500mm | 2500mm |
| Hiefhéicht | 1500mm | 1500mm | 1500mm | 1500mm |
| Loftdrock | 0,5-0,8 MPa | 0,5-0,8 MPa | 0,5-0,8 MPa | 0,5-0,8 MPa |
| Rotatiounswénkel A | 360° | 360° | 360° | 360° |
| Rotatiounswénkel B | 300° | 300° | 300° | 300° |
| Rotatiounswénkel C | 360° | 360° | 360° | 360° |






a) Et kann den Gravitatiounsgläichgewiichtszoustand vu verschiddene Gewiichtsmaterialien realiséieren, wat fir de präzisen Transfert vu Materialien gëeegent ass.
b) Wann keng Laascht, voll Laascht a verschidde Werkstécker veraarbecht ginn, kann de System d'Gewiichtsännerung spieren an den schwiewenden Zoustand vun der Laascht am dräidimensionalen Raum feststellen, wat fir eng präzis Positionéierung praktesch ass.
c) D'Charakteristike vu vollem Gläichgewiicht, enger roueger Bewegung, etc., erméiglechen et dem Bedreiwer, d'Handhabung, d'Positionéierung an d'Montage vum Werkstéck einfach duerchzeféieren.
d) De steife Aarm kann de Manipulator dozou bréngen, d'Wierkstéck iwwer Hindernisser ze droen; den horizontalen Aarm kann d'Ufuerderunge vun der horizontaler Plazéierung an der horizontaler Entfernung vu Materialien op de jeeweilege Plazen erfëllen.
e) De System kann ëmmer den Niveau vum Kapp vum Manipulator halen an eng héich Bearbeitungsfäegkeet ausüben.
f) Gelenkbremsvorrichtung, mat multiple rotéierende Gelenker fir d'Materialsammlung an d'Plazéierung an engem grousse Beräich ze realiséieren; equipéiert mat enger Bremsvorrichtung kann den Operateur d'Bewegung vum Manipulator zu all Moment während dem Betrib ënnerbriechen.



Dës Zort vu Kraaftmanipulator kann bis zu 500 kg Werkstéck hiewen. Den Aarbechtsradius ass ongeféier 2500 mm an d'Hiefhéicht ass ongeféier 1500 mm. Jee no Gewiicht vum Hiewwierk sollt déi klengst Maschinn ausgewielt ginn, déi dem maximale Gewiicht vum Werkstéck entsprécht. Wann eng maximal Laascht vun 200 kg vum Manipulator benotzt gëtt fir 30 kg Werkstéck ze droen, dann ass d'Betribsleistung sécherlech net gutt an et fillt sech ganz schwéier un. D'Ausrüstung ass standardméisseg mat engem Loftspäicherbehälter ausgestatt, deen am Fall vun engem Gasausfall ëmmer nach en Aktiounszyklus ausféiere kann. Gläichzäiteg gëtt en Alarm ausgeléist fir de Bedreiwer z'erënneren. Wann den Loftdrock bis zu engem gewësse Grad fällt, start en d'Selbstspärfunktioun fir den Réckgang vum Werkstéck ze verhënneren. E Manipulator mat Sécherheetssystem kann d'Wierkstéck beim Handhaben oder net an der sécherer Positioun placéiert kréien an de Bedreiwer kann et net lassloossen. Mat verschiddenen net-Standard-Opbauelementer kann de Kraaftmanipulator mat haarder Aarm eng Vielfalt vu Prozessaktiounen einfach ausféieren.





